

Pod 30x Zoom UAV Laser Range Dinder pour la surveillance et la cartographie









Le POD DC-03 est équipé d'un cardan non orthogonal à trois axes de haute précision, et est équipé d'une caméra zoom hybride large et 30x. Après avoir trouvé l'objet cible dans l'image grand angle, il peut rapidement passer à l'image de zoom pour une observation détaillée. Le pod est également équipé d'un télémètre laser, qui peut fournir les coordonnées de distance et de position de la cible d'observation, d'aider au positionnement rapide et précis et d'améliorer l'efficacité opérationnelle,
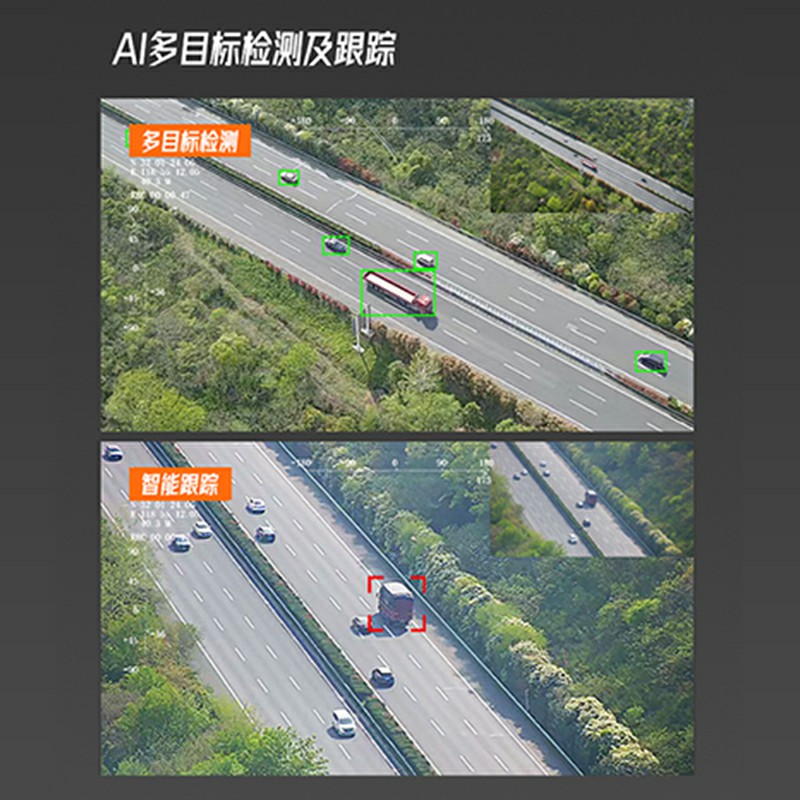
Le pod DC-03 a des capacités de détection et de suivi multi-cibles al. Le pod peut reconnaître intelligemment les piétons et les véhicules dans l'image capturée et verrouiller et suivre en continu n'importe quelle cible. Le pod DC-03 prend en charge l'installation vers l'avant et inversée et peut être rapidement installé sur divers véhicules aériens sans pilote ou autres plates-formes de transporteur sans avoir besoin d'outils. Combiné avec GCU et les logiciels d'affichage et de contrôle de libellule, il peut afficher des images en temps réel sur l'ordinateur et contrôler le pod, en prenant en charge la photographie et l'enregistrement vidéo.
Équipé de capacités de détection et de suivi multi-cibles d'IA, il peut reconnaître intelligemment les piétons et les véhicules dans les images capturées et verrouiller et suivre en continu l'une d'entre elles. L'appareil photo zoom hybride grand angle et 30x forment une combinaison double champ de vision, permettant une commutation rapide entre la vue globale et les images détaillées.
Le télémètre laser peut fournir les coordonnées de distance et de position de la cible observée, aidant au positionnement rapide et précis.
Adoptant une forme sphérique de petite taille et une structure de stabilisation mécanique à trois axes non orthogonale, nous nous efforçons de minimiser le rayon de tournage et la résistance au vent. L'axe de lacet peut tourner en continu à 360 ° xn.
Coopérez avec GCU pour soutenir le réseau, le port série et le contrôle des bus S, compatible avec les protocoles privés et les protocoles de liaison Mav, facilitant le développement secondaire.
En utilisant le double algorithme complémentaire IMU, combiné avec le contrôle de la température de l'IMU et la fusion des données de navigation inertielle du porte-parole, la précision de stabilisation de l'image peut atteindre ± 0,01 °, et le pod peut toujours rester stable pendant les manœuvres sévères du porte-parcours.
Prend en charge l'installation verticale et inversée, permettant une installation rapide sur diverses plates-formes de transporteur.
En conjonction avec GCU et le logiciel d'affichage et de contrôle de Dragonfly, l'affichage en temps réel des images peut être réalisé sur l'ordinateur sans avoir besoin d'intégration de protocole, tout en permettant le contrôle du pod.
Le logiciel QGC personnalisé peut être associé à des contrôleurs de vol open source pour atteindre toutes les fonctions du pod.
L'écran prend en charge les informations OSD telles que la latitude, la longitude et l'altitude à Rongjia. Les photos prennent en charge la rédaction des coordonnées du point de prise de vue EXIF Informations. Les flux vidéo prennent en charge l'ajout de SE1
14 ~ 53 Entrée de tension large VDC

Ce support de lancement portable pour drones lourds offre une capacité de charge utile de 40 kg avec une double éjection, conçu pour un déploiement stable par vent latéral des drones à voilure fixe. Sa conception pliable de qualité aéronautique assure une installation rapide sur le terrain, idéale pour la reconnaissance militaire et les missions industrielles. Découvrez les spécifications techniques de solutions aériennes robustes.
Détails
La pince pour drone ZS-035 adopte un entraînement pneumatique précis, permettant de saisir, transférer, adsorber et libérer des objets dans des environnements sensibles et fragiles, des espaces restreints, des environnements complexes, etc. Résistante à l'eau et à la poussière, elle pivote librement et s'adapte avec souplesse à différents types de drones. Elle est largement utilisée dans les infrastructures, les services publics, la collecte d'échantillons en environnements dangereux, les opérations en haute altitude et les opérations de secours et de secours après sinistre.
Détails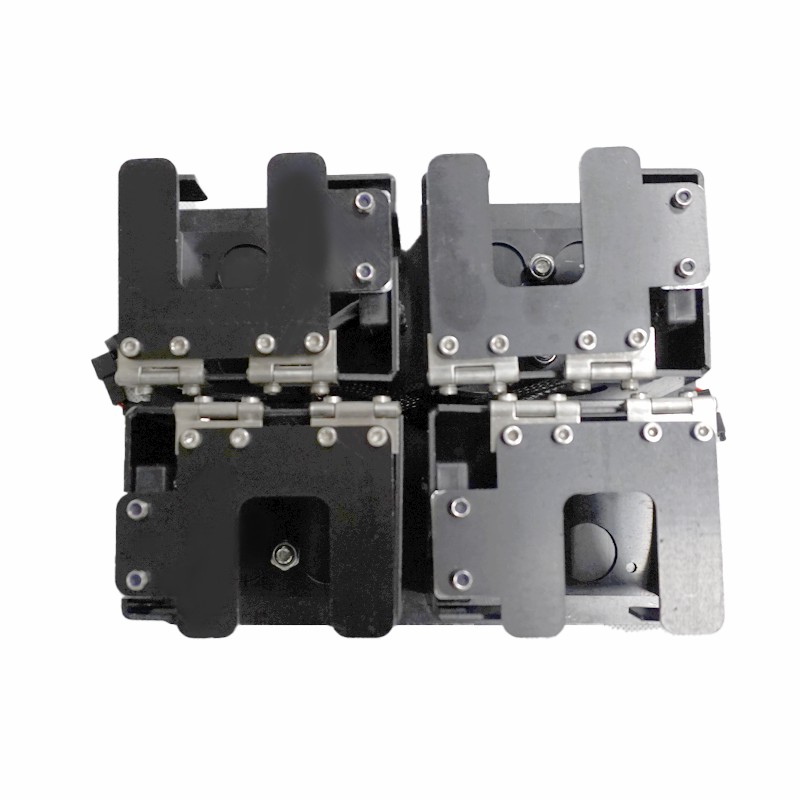
Ce produit peut être utilisé avec le mortier 60 pour les projectiles de précision, la structure de la langue de verrouillage unidirectionnelle intégrée est sûre et solide, et peut réaliser un fonctionnement de chargement non électrique et un fonctionnement de chargement aérien. Le produit peut être utilisé avec des drones supérieurs à la capacité de chargement de 3 kg pour obtenir une variété de combinaisons de numéros de canal et de configurations, avec des commutateurs d'assurance logicielle intégrés et des commutateurs d'assurance matérielle intégrés et des modernes de cible visuelle et facultatifs sur la sécurité opérationnelle et les facultés visuelles.
Détails
Ce caméra de drone cardan industriel à 3 axes Intègre la technologie du zoom hybride de pointe et les algorithmes de stabilisation focale pour fournir une imagerie cristalline même pendant les manœuvres à grande vitesse. Conçu pour inspection aérienne et surveillance de la sécurité Missions, sa technologie anti-titulaire assure une précision au niveau du millimètre dans cartographie de haute précision applications. Le boîtier robuste permet un fonctionnement stable dans environnements venteux, tandis que le téléobjectif à longue portée La capacité (30x optique + 120x zoom numérique) capture les détails critiques à 500 m. Compatible avec les systèmes d'imagerie UAV standard, c'est l'ultime caméra de drone pour les opérations de vent de vent nécessitant une fiabilité et une clarté.
Détails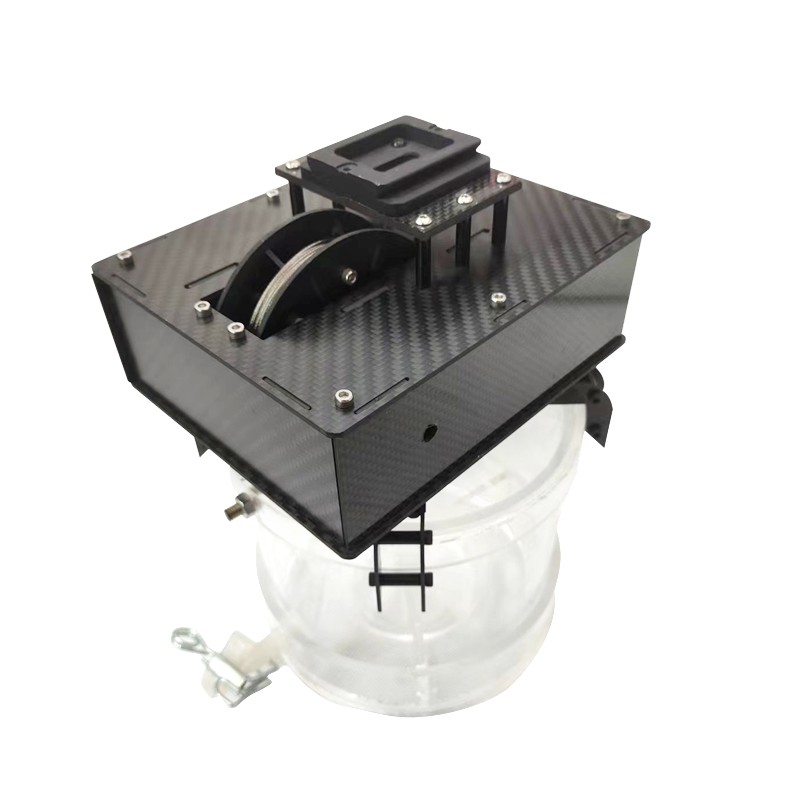
Le dispositif d'extraction de l'eau d'UAV QS-1.5 est bien fait, une conception de structure unique et fait de matériaux de synthèse élevée résistants à la corrosion. Les échantillons d'eau peuvent être automatiquement prélevés sur les rivières, les rivières et autres zones par le UAV monté pour améliorer l'efficacité de la collecte des échantillons d'eau. Le dispositif de décollage développé indépendamment par notre entreprise, qui affiche la profondeur de la précision d'échantillonnage en temps réel, afin d'obtenir une collection plus précise.
Détails
Le POD DC-03 est équipé d'un cardan non orthogonal à trois axes de haute précision, et est équipé d'une caméra zoom hybride large et 30x. Après avoir trouvé l'objet cible dans l'image grand angle, il peut rapidement passer à l'image de zoom pour une observation détaillée. Le pod est également équipé d'un télémètre laser, qui peut fournir les coordonnées de distance et de position de la cible d'observation, d'aider au positionnement rapide et précis et d'améliorer l'efficacité opérationnelle,Le pod DC-03 a des capacités de détection et de suivi multi-cibles al. Le pod peut reconnaître intelligemment les piétons et les véhicules dans l'image capturée et verrouiller et suivre en continu n'importe quelle cible. Le pod DC-03 prend en charge l'installation vers l'avant et inversée et peut être rapidement installé sur divers véhicules aériens sans pilote ou autres plates-formes de transporteur sans avoir besoin d'outils. Combiné avec GCU et les logiciels d'affichage et de contrôle de libellule, il peut afficher des images en temps réel sur l'ordinateur et contrôler le pod, en prenant en charge la photographie et l'enregistrement vidéo.
Détails
Ce Système de capteur de drone de détection multi-AGAS proposer UAU de surveillance de la qualité de l'air en temps réel Capacités, intégrant plus de 100 capteurs remplaçables pour détecter le CO2, le PM2,5, les COV et les gaz toxiques comme H2S. Conçu pour Détecteur de fuite de COV industriel Applications et vérification de la conformité environnementale, sa transmission à double mode 4G / WiFi offre des cartes de pollution instantanées aux stations à la terre. Le Enregistreur de données atmosphériques autonomes prend en charge les interfaces chinoises / anglaises, l'activation mappage de drones PM2.5 sans fil Dans toutes les usines, les décharges et les zones de catastrophe. Avec la trajectoire de vol de cartes thermiques et la comparaison des données historiques, c'est l'ultime outil d'enquête environnementale à double langue pour les équipes de sécurité industrielle et les inspecteurs de l'EPA.
Détails
Dans le contexte actuel de développement rapide des technologies, les équipements militaires sont également en constante innovation. L'équipement innovant du canon Type 95 monté sur le drone est tel un nouvel étendard brillant sur la scène militaire moderne.
Détails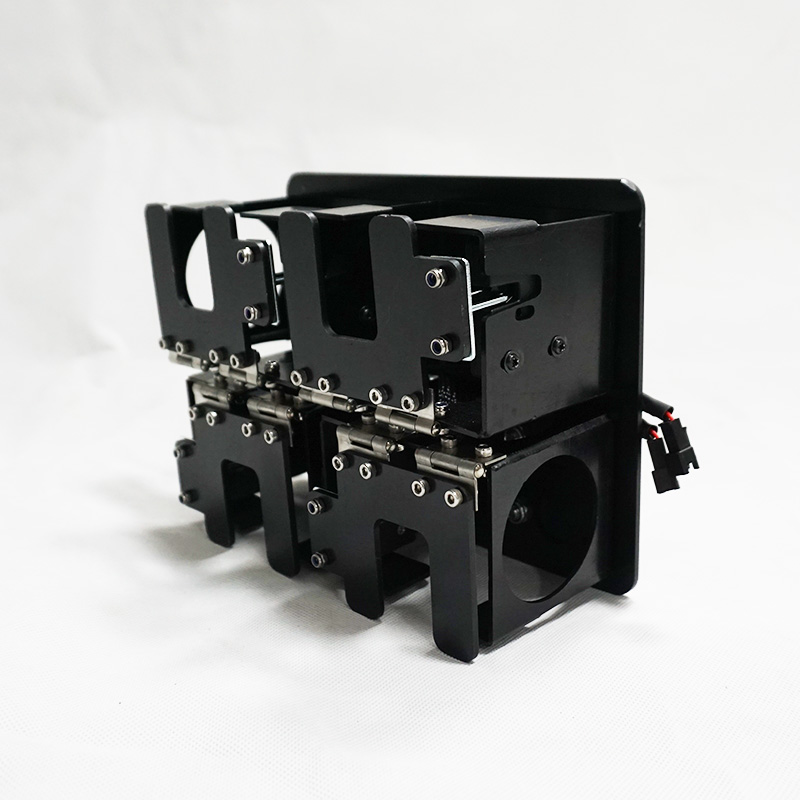
Conçu pour frappes de haute précision et déploiement rapide sur le champ de bataille, notre Lanceur de mortier monté sur drone à guidage de précision livre Précision de la cible à 3 m dans un Portée de contrôle de 5 kmIdéal pour les missions tactiques et les interventions d'urgence. Découvrez ci-dessous ses spécifications avancées et ses fonctionnalités prêtes au combat.
Détails
Conçu pour la précision et la vitesse, notre Lanceur de grenades fumigènes à déploiement rapide multi-charges monté sur drone livre déploiement de fumée tactique à haute altitude avec Adaptabilité multi-scénarios 38 mmIdéal pour la lutte antiterroriste et les opérations d'urgence. Découvrez ci-dessous ses spécifications avancées et ses fonctionnalités performantes.
Détails
Le module LQ-4 à quatre lumières intègre des modules d'imagerie thermique, de zoom, de télémétrie laser et de grand angle, permettant une détection précise par tous les temps grâce à la collaboration de données multisources. Équipé d'un système d'imagerie thermique haute résolution et d'une fonction de mesure de distance longue portée, il est associé à un zoom hybride à fort grossissement et à une technologie de zoom optique à fort grossissement. Il est également doté d'éléments photosensibles de grande taille pour l'enregistrement d'images ultra haute définition, et d'un objectif grand angle haute définition pour élargir le champ de vision. La plateforme d'algorithmes intelligents intégrée offre une capacité de suivi dynamique de cible basée sur l'apprentissage profond, et la conception de la rotation globale de l'axe de cap s'adapte aux exigences d'angles opérationnels complexes. L'optimisation de la structure d'absorption des chocs et de l'interface modulaire améliore considérablement l'adaptabilité environnementale, permettant l'extension et l'intégration de plusieurs appareils. Grâce à des algorithmes de contrôle hautement collaboratifs et à des systèmes de cardan stables, il garantit une image claire et un contrôle précis dans les scènes dynamiques. Il peut être largement utilisé pour les exigences de montage de niveau professionnel dans des domaines tels que les aéronefs à voilure tournante, les plateformes à décollage et atterrissage verticaux et les robots mobiles intelligents. Ce système de télémètre laser à imagerie thermique haute résolution intègre quatre capteurs avancés pour offrir aux drones et aux robots une perception environnementale par tous les temps. Grâce à son suivi dynamique et à son imagerie ultra-HD, il garantit une clarté optimale pour les opérations de secours incendie, la cartographie du terrain et les inspections industrielles.
Détails
Le module d'éclairage double adopte une conception collaborative de détection à double lumière visible et thermique, avec une structure légère améliorant la perception multidimensionnelle du drone. Le module d'imagerie thermique est équipé de capteurs haute résolution et de téléobjectifs, permettant la mesure de température sans contact et l'identification des sources de chaleur anormales. Des algorithmes intelligents permettent un suivi continu de la cible et un reverrouillage rapide, tandis que le zoom/assemblage synchrone à double objectif améliore l'efficacité de l'information. Les capteurs d'image haute définition associés à la technologie de réglage dynamique optimisent la qualité d'image, et le grand angle de rotation panoramique/inclinaison permet une observation panoramique, s'adaptant aux exigences des scènes complexes.
Détails




 IPv6 network supported |
Plan du site
|
Xml
|
bloguer
|
politique de confidentialité
|
Nouvelles
IPv6 network supported |
Plan du site
|
Xml
|
bloguer
|
politique de confidentialité
|
Nouvelles
Nos horaires
Lun 11/21 - mer 11/23: 9 h à 20 h
Jeu 11/24: Fermé - Joyeux Thanksgiving!
Ven 11/25: 8 h à 22 h
Sam 11/26 - dimanche 27/27: 10 h - 21 h
(toutes les heures sont l'heure est)










